- Antweight für Anfänger – Der Lifter
-
-
Auf dieser Seite konstruieren wir einen einfachen Lifter für
unseren einfachen Ant. Der Lifter wird den Ant nicht aufrichten
können aber das liegt an der Funktion meiner Funke und ist
letztlich in der Konstruktion jedem Roboteer selbst überlassen.
Als Basis für den Lifter dient hier ein einfacher Spachtel aus
Federstahl, den ich im Baumarkt für etwa 3 Euro gekauft habe.
-
-
Material: Wir benötigen für diese Konstruktion etwa
5 cm Aluminiumwinkel 2 x 2 cm, 1mm stark, drei M3-Polyamidschrauben
(andere Materialien gehen natürlich auch), drei M3-Muttern und
einen Servo, in unserem Fall ein ES-05 JR, den man für unter 6
Euro bekommt.
-
-
Werkzeug: An Werkzeug habe ich für diese Konstruktion
neben einem 3-mm-Bohrer eine Metallsäge, einen 1mm-Bohrer,
einen Schraubstock, einen Stift, eine Metallfeile und etwas
Doppelklebeband verwendet. Und meinen Dremel mit Schleifkopf für
die Entgratung von Aluminiumteilen und das Abschleifen des Servos,
wobei man sich letzteres durch eine besser durchdachte
Lifterkonstruktion sparen kann.
-
-
 Schritt
1: Wir bohren zwei Löcher in die mitte des Spachtels
entlang der Längsachse. Dazu verwenden wir den M3-Bohrer und
legen ein Stück Holz unter. Die Bohrmaschine sollte auf hohe
Drehzahl eingestellt sein und man sollte trotz der geringen Dicke
mehrmals ansetzen – Federstahl ist sehr zäh. Danach
spannen wir den Spachtel entlang der Linie in den Schraubstock ein,
an der wir ihn absägen wollen – direkt entlang des
Schraubstocks kann der Federstahl weniger federn und lässt sich
so einfacher sägen.
Schritt
1: Wir bohren zwei Löcher in die mitte des Spachtels
entlang der Längsachse. Dazu verwenden wir den M3-Bohrer und
legen ein Stück Holz unter. Die Bohrmaschine sollte auf hohe
Drehzahl eingestellt sein und man sollte trotz der geringen Dicke
mehrmals ansetzen – Federstahl ist sehr zäh. Danach
spannen wir den Spachtel entlang der Linie in den Schraubstock ein,
an der wir ihn absägen wollen – direkt entlang des
Schraubstocks kann der Federstahl weniger federn und lässt sich
so einfacher sägen. -
-
-
-
-
-
-
-

 Schritt
2: Wir feilen und sägen an einem etwa 3 cm langen Stück
des Aluprofils herum, bis wir einen Winkel haben, mit dem wir den
Arm des Servos und unseren Lifter miteinander verbinden können.
Indem wir durch die Löcher im Spachtel hindurch anzeichnen
können wir Löcher in den Winkel bohren. Ich habe am
Servoarm nur ein Loch gebohrt, durch das eine Schraube passt –
am Ende war mir der Arm dafür zu Dünn. Mit dem 1-mm-Bohrer
habe ich dafür ein Loch gebohrt, durch das ich einen Draht als
zweiten Ankerpunkt ziehen kann. Am Ende hat man eine Verbindung
zwischen Spachtel und Servoarm.
Schritt
2: Wir feilen und sägen an einem etwa 3 cm langen Stück
des Aluprofils herum, bis wir einen Winkel haben, mit dem wir den
Arm des Servos und unseren Lifter miteinander verbinden können.
Indem wir durch die Löcher im Spachtel hindurch anzeichnen
können wir Löcher in den Winkel bohren. Ich habe am
Servoarm nur ein Loch gebohrt, durch das eine Schraube passt –
am Ende war mir der Arm dafür zu Dünn. Mit dem 1-mm-Bohrer
habe ich dafür ein Loch gebohrt, durch das ich einen Draht als
zweiten Ankerpunkt ziehen kann. Am Ende hat man eine Verbindung
zwischen Spachtel und Servoarm. -
-
-
-

-
Schritt 3: Als nächstes montieren wir den Servo auf dem
Chassis unseres Bots. In meiner Konstruktion gehört der Servo
aufrecht aufgesetzt. Der Servo wird mit Doppelklebeband fixiert.
Dies ist nicht genug, um ihn fest zu halten, daher verkleben wir ihn
mit dem rest des Aluprofils, ebenfalls mit Doppelklebeband.
-
-
-
-
-
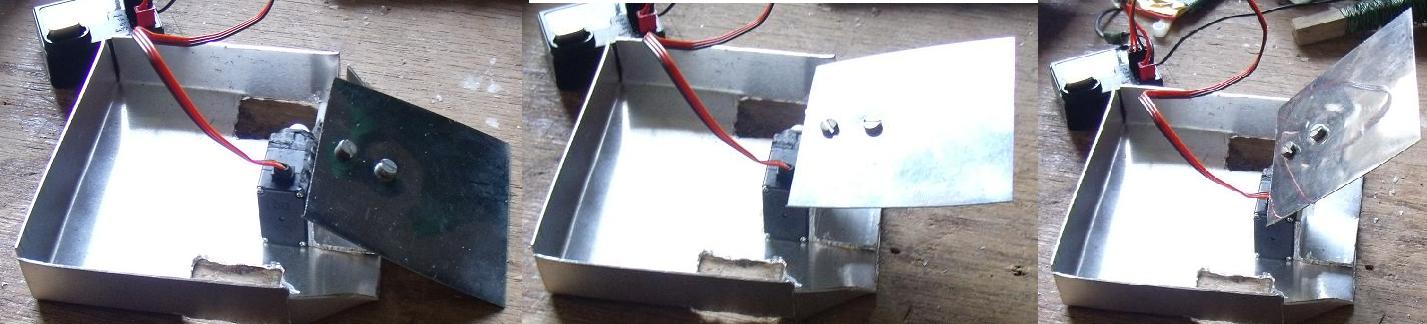
Schritt 4: Wir setzen den Servoarm mit dem Lifter so auf,
dass wir ihn mit der Fernbedienung um den Mittelpunkt des Servos
herum sinnvoll steuern können. Meine Fernsteuerung kann auf
ihrem dritten Kanal nur 90°-Bewegungen auf den Servo bringen,
daher setze ich den Arm so auf, dass er in der unteren Position den
Bot vorne leicht anhebt und somit direkt über den Boden schabt
und in der oberen Position nach oben zeigt. Fertig ist der Lifter,
zugegebenermaßen nicht das Nonplusultra, aber ausreichend um
z.B. KillaCan oder WarStyle anzuheben und somit ihre
Manövrierfähigkeit stark einzuschränken.

