- Antweight für Anfänger: Servohack
-
- Auf dieser Seite möchte ich eine konkrete Anleitung zum
Rundlaufhack eines spezifischen Servotyps geben. Dieser Hack erlaubt
es hinterher, den Servo als umlaufenden Motoren für den Antrieb
eines Antweights zu verwenden. Servos haben gegenüber
Getriebemotoren den Vorteil für Anfänger, dass sie einfach
mit Rädern zu verbinden sind, günstig in der Anschaffung
sind, einfach zu ersetzen und vor allem ohne Fahrtregler direkt an
den Empfänger angeschlossen werden können.
-
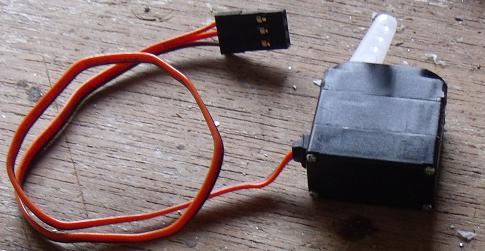
- Der Servo: ES 05-JR.
-
Der ES 05-JR, erhältlich bei Conrad Elektronik für 5,95 €,
ist für einen Einsteigerant aus verschiedenen Gründen gut
geeignet: Er ist kompakt () und relativ leicht (8 g), hat aber
dennoch eine gute Quaderform ohne große Ausbuchtungen, was ihn
einfach zu verplanen macht und ist vor allem mit wenigen einfachen
Arbeitsschritten einfach zum runden Umlauf zu hacken. An Zubehör
liegen dem Servo eine Scheibe, ein Servoarm und ein Servokreuz bei,
sowie eine Schraube, mit der aufgestecktes Zubehör verschraubt
werden kann. Die Scheibe und das Kreuz eignen sich gut für die
Montage an Rädern aber das ist ein anderer Abschnitt im Bau
eines eigenen Antweights...
-
- Die Werkzeuge:
- Für diesen Hack werden ein paar Werkzeuge benötigt:
Ein feiner Kreuzschlitzschraubenzieher zum Öffnen des Servos,
ein kleiner Schlitzschraubenzieher für die Justierung des
Potis, eine Zange mit Schneidefunktion (Seitenschneider, Kneifzange
oder Kombinzange) und eine Kugelkopffräse z.B. an einem Dremel.
Die Arbeitsschritte lassen sich meist auch mit alternativen
Werkzeugen durchführen, da muss man selbst wissen, was man in
der Werkstatt hat und/oder sich anschaffen möchte. Ich besitze
eine Kugelkopffräse an einem Dremel, den ich mal günstig
für knapp 30 € bei einem Discounter gekauft habe und
seitdem für fast alle Metallarbeiten verwende.
-
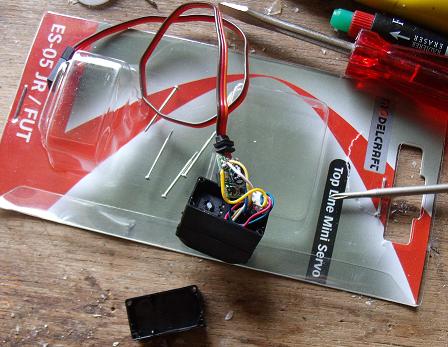

- Schritt 1: Den Servo öffnen
-
Wir fangen an, indem wir mit dem Kreuzschlitzschraubenzieher die
vier Schrauben des Servos lösen. Das Gehäuse des Servos
besteht aus drei Teilen, der unteren Abdeckung, unter der sich der
Motor und die Platine befinden, dem Mittelteil, in dem das Poti
sitzt und auf dem das Getriebe aufliegt, und der oberen Abdeckung,
die das Getriebe an seinem Platz zusammenhält. Wir entfernen
zunächst vorsichtig die obere Abdeckung, so dass das Getriebe
nicht gleich auseinanderfällt. Es ist wichtig, sich zu merken,
wie das ganze hinterher wieder zusammengesetzt wird.
-
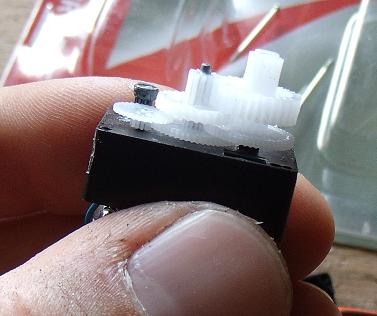
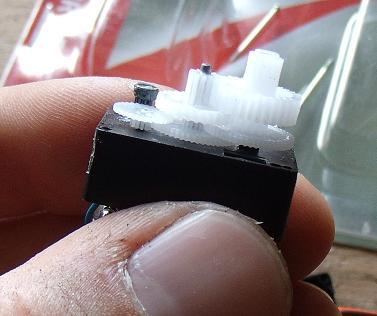
- Schritt 2: Das Getriebe abnehmen
-
Wir nehmen nun vorsichtig drei der Zahnräder des Getriebes ab
und legen sie auf eine saubere Oberfläche. Durch das
Schmierfett nehmen diese Teile gerne Schmutz auf und wir wollen
nicht, dass uns später ein Stück Metallspäne oder
anderer Werkstattdreck das Getriebe kaputtmacht. Man beachte die
kleinen Stege im großen Endzahnrad. Diese verhindern im Servo,
dass er sich um mehr als 180° drehen kann. Da der Steg in einem
wichtigen Zahnrad liegt, gehen wir die Sache allerdinds an dessen
Gegenspieler an.
-
 Schritt
3: Die Sperre ausfräsen
Schritt
3: Die Sperre ausfräsen-
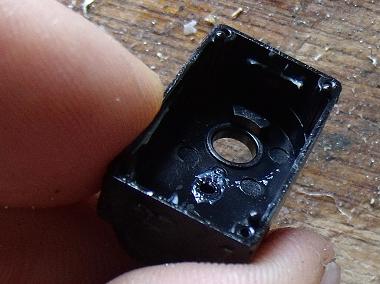
Auf der Innenseite der oberen Abdeckung befindet sich eine Erhöhung,
die in das Endzahnrad hineinreicht und die 360°-Drehung der
Stege blockiert. Diese fräsen wir jetzt mit der Kugelkopffräse
weg. Dabei ist darauf zu achten, dass die Erhöhung vollständig
verschwindet, das runde Loch für die Servoachse jedoch
unbeschädigt bleibt. Nach dem Fräsen müssen natürlich
alle Reste von Plastikspäne aus der Abdeckung entfernt werden.
-

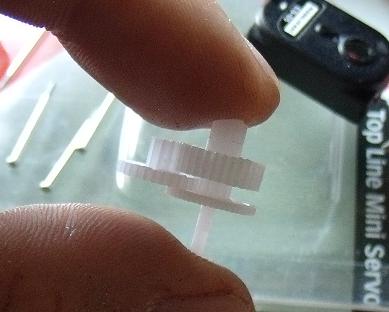
- Schritt 4: Die Potiverbindung kappen
-
Als nächstes sehen wir uns das Hauptzahnrad nochmal genau an.
An der unteren Achse befindet sich eine abgeflachte Verlängerung,
die in einen Schlitz in der Mitte des Potis hineinreicht, wenn die
Zahnräder aufgesetzt sind. Diese knipsen wir mit der Zange ab.
Dabei nur den abgeflachten Teil kappen, nicht den Runden – den
brauchen wir noch. Ist der Schnitt nicht sauber, noch etwas die
Kanten nacharbeiten.
-
 Schritt
5: Das Getriebe wieder aufsetzen
Schritt
5: Das Getriebe wieder aufsetzen-
Das Getriebe so, wie es vorher war wieder in seine Halterung setzen
und it der oberen Abdeckung fixieren. Da wir noch nicht fertig sind
wird die obere Abdeckung erstmal nur aufgesetzt.
-
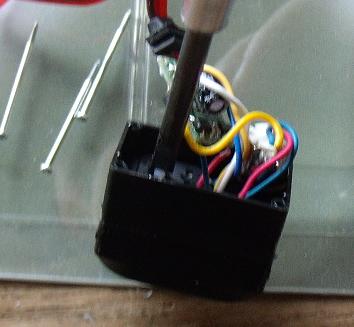 Schritt
6: Das Poti justieren
Schritt
6: Das Poti justieren-
Wir schließen den Servo an den Empfänger, schalten unsere
Funke ein und geben dem Empfänger dann Strom. In meinem Fall
verwende ich einen 40-MHz-Empfänger, neuere 2,4-GHz-Modelle
sollten aber gleichermaßen funktionieren. Der Servo sollte
jetzt vor sich hindrehen. Wir bringen den Hebel an der Funke, der
den Servo nun steuert in seine Mittelposition und gehen dann von
unten mit dem Schlitzschraubenzieher an das Poti und drehen daran
herum. Bei einer bestimmten Position sollte das Poti so eingestellt
sein, dass sich die Drehrichtung des Servos ändert. Wir
justieren dort so lange herum, bis der Servo steht und sich nur
dreht, wenn wir den Hebel an der Funke betätigen. Das ist die
Mittelstellung, die wir wollen. Viele Funken haben zudem eine
Trimmfunktion, mit der diese Feineinstellung noch nachjustiert
werden kann. Dies wird möglicherweise bei jedem Start des Bots
nötig sein.
-
- Schritt 7: Den Servo wieder zusammenbauen
-
Nachdem der Servo jetzt mit der Fernsteuerungsanlage vor- und
rückwärts umlaufend gesteuert werden kann nehmen wir das
Kabel wieder vom Empfänger ab und setzen die Kabelführung
wieder in ihre Nische. Wir verstauen die Servoelektronik wieder an
ihrem Platz in der Servohülle und setzen die untere Abdeckung
auf. Die vier Schrauben wieder festschrauben und fertig ist der
Antriebsservo!
-


